Log in to myMicrochip to access tools and benefits. Sign up in just one minute.
Maximize Your Experience: Reap the Personalized Advantages by Completing Your Profile to Its Fullest. Update Here
Stay in the loop with the latest from Microchip. Update your profile while you are at it. Update Here
Complete your profile to access more resources. Update Here
true
Zero-Speed Maximum Torque (ZSMT) Algorithm
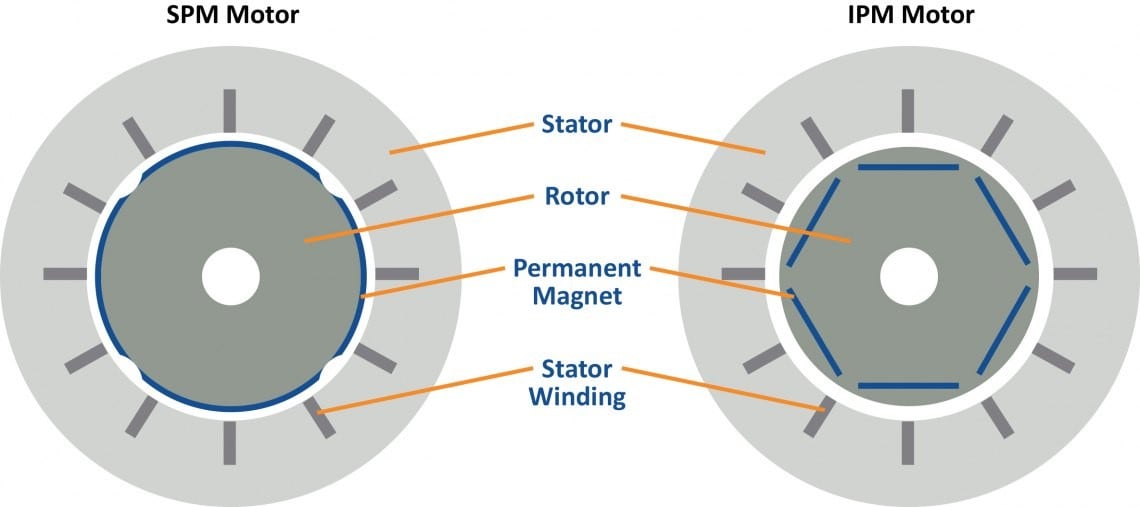
Surface Permanent Magnet (SPM) Side by Side with Interior Permanent Magnet (IPM) Motor
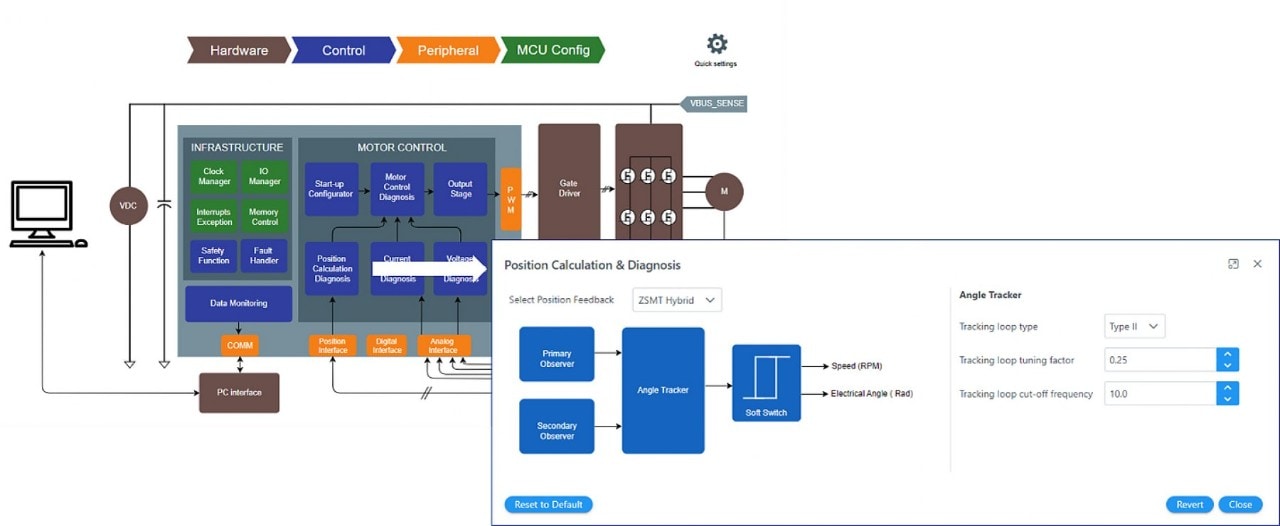
The MPLAB® Harmony QuickSpin motor control configuration tool makes it easy to get started with ZSMT. The ZSMT configurator is located in the position calculation and diagnosis click-in block and currently supports PIC32MK and SAM D/E5x MCUs. ZSMT is also supported by the MathWorks® MATLAB® and Simulink® environments.
Zero-Speed Maximum Torque (ZSMT) Algorithm
Get Started with MPLAB Harmony QuickSpin
MPLAB Harmony QuickSpin offers an intuitive visual environment that simplifies the setup and tuning of Field-Oriented Control (FOC) motor control applications.
